







6ES7223-1BH32-0xB0西门子8DI/8DO晶体管
接下来编程插入指令:
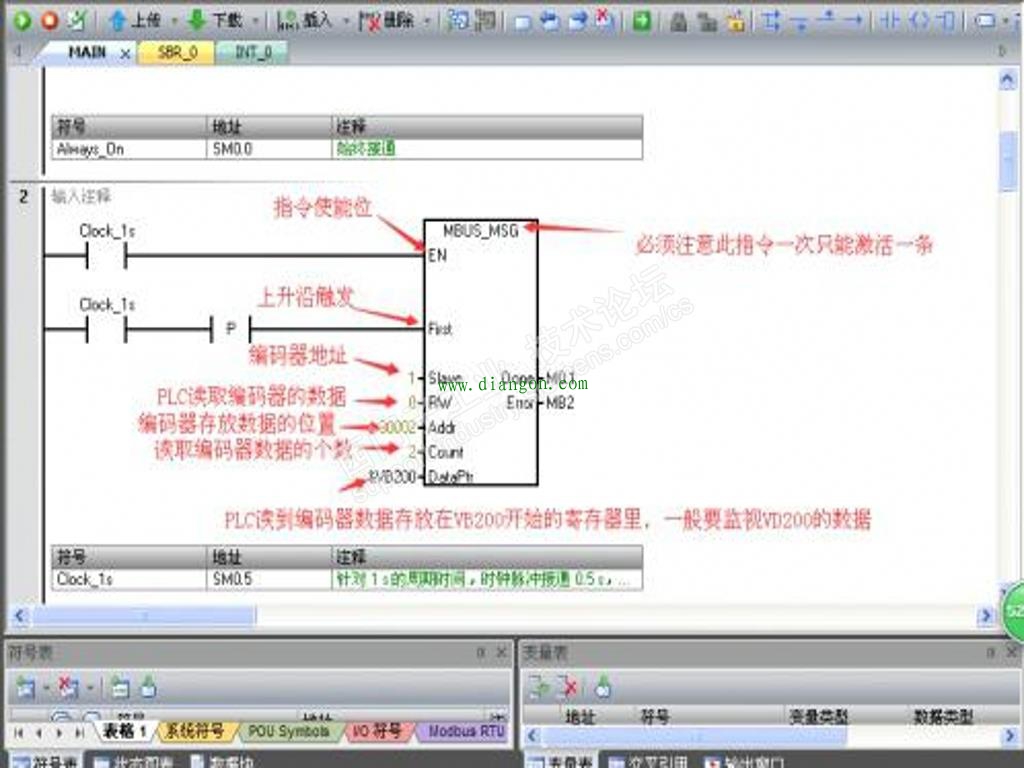
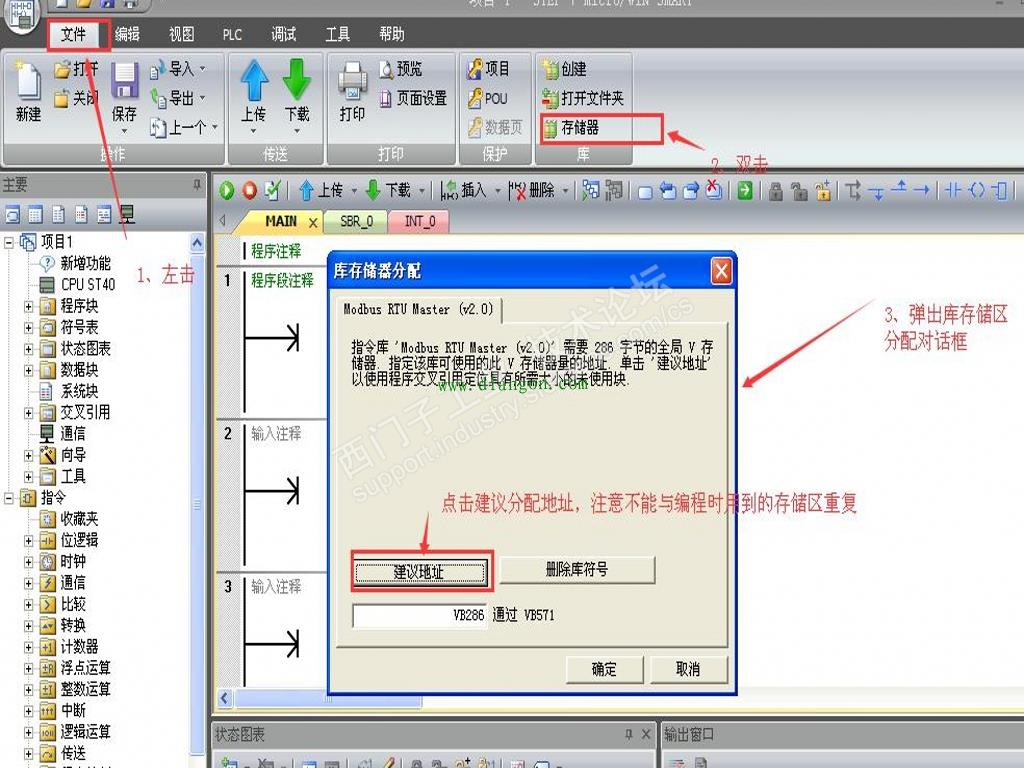
4、给MODBUS指令分配库寄存器
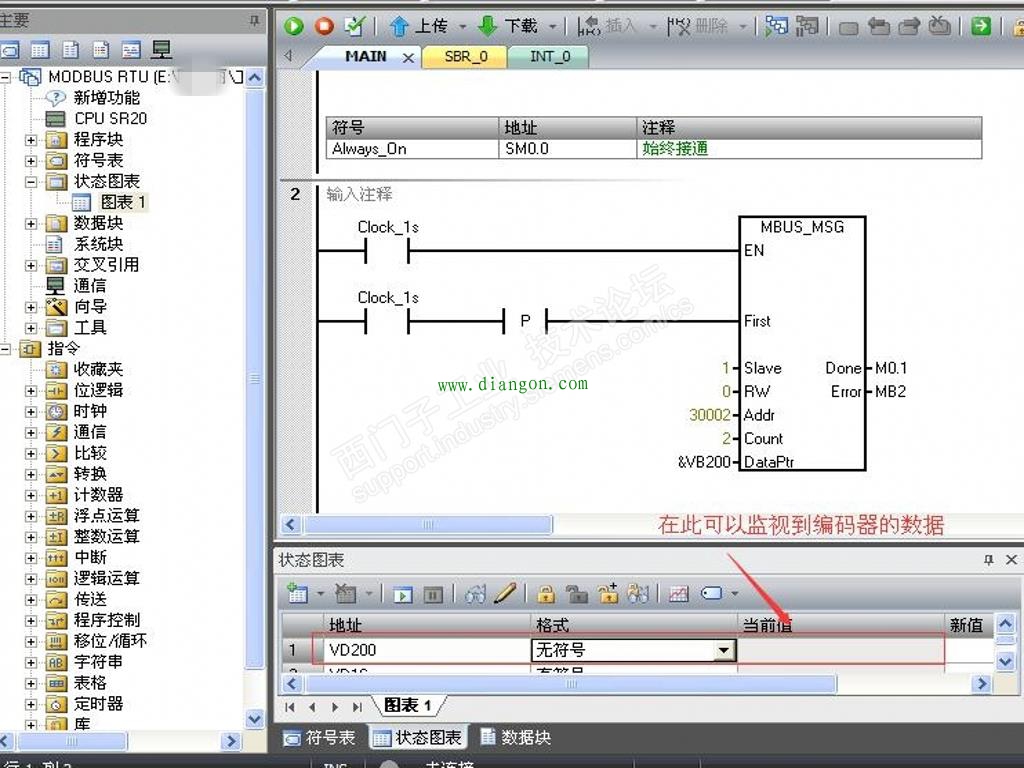
5、编译、下载,可以在状态图表里监控VD200数据
PLC读到的编码器数据存放在VD200里
注:这里的编码器值是长度值还是角度值需要可以通过easyPro软件来设定
如果是角度值需要除以100,有2位小数点
与西门子smart 200 连接的编码器是GAX60 R13/12E10LB
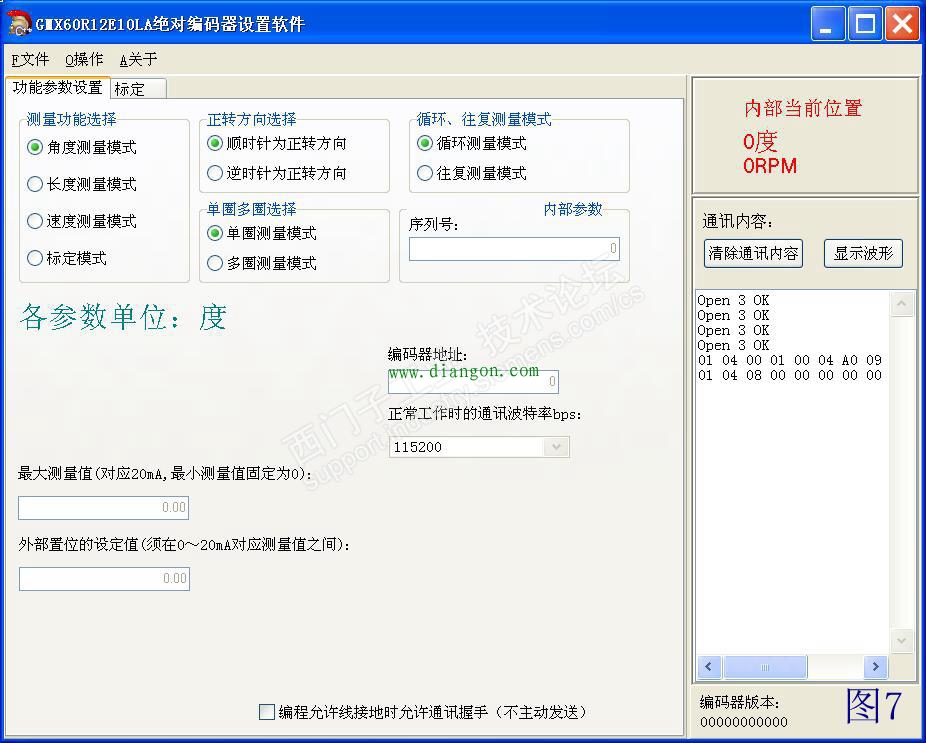
该编码器有强大的EasyPRO?软件设置功能,设置功能和参数如下:
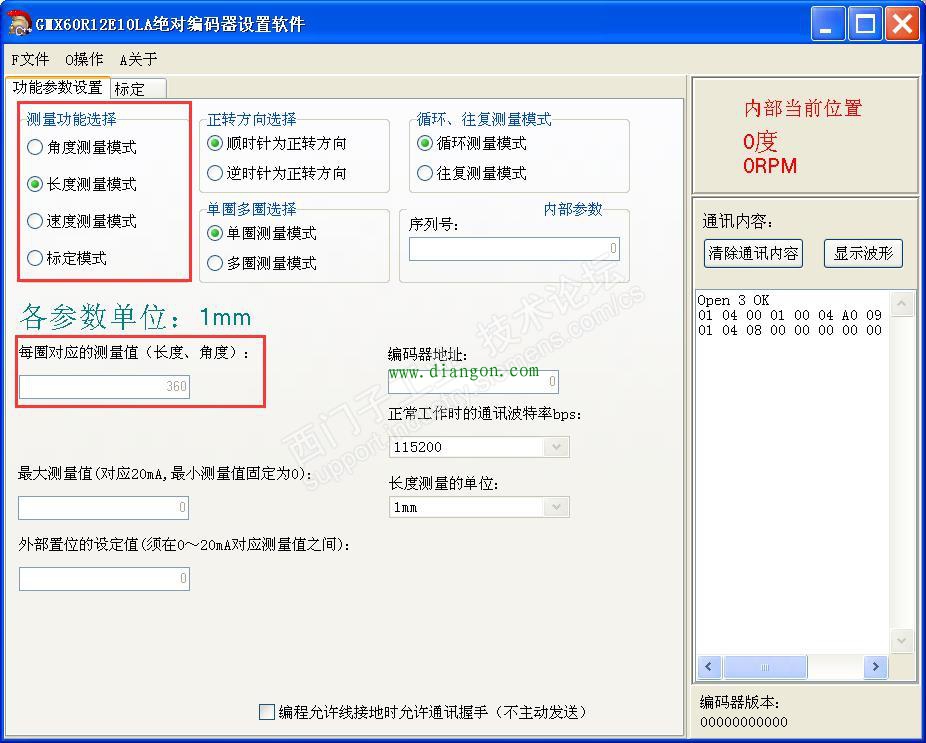
1、测量功能,能选择有:角度测量、长度测量、速度测量,出厂默认的是长度模式。
2、长度测量模式和角度测量模式相比,多了“每圈对应的测量值”填充框,可以对圈长进行设置。
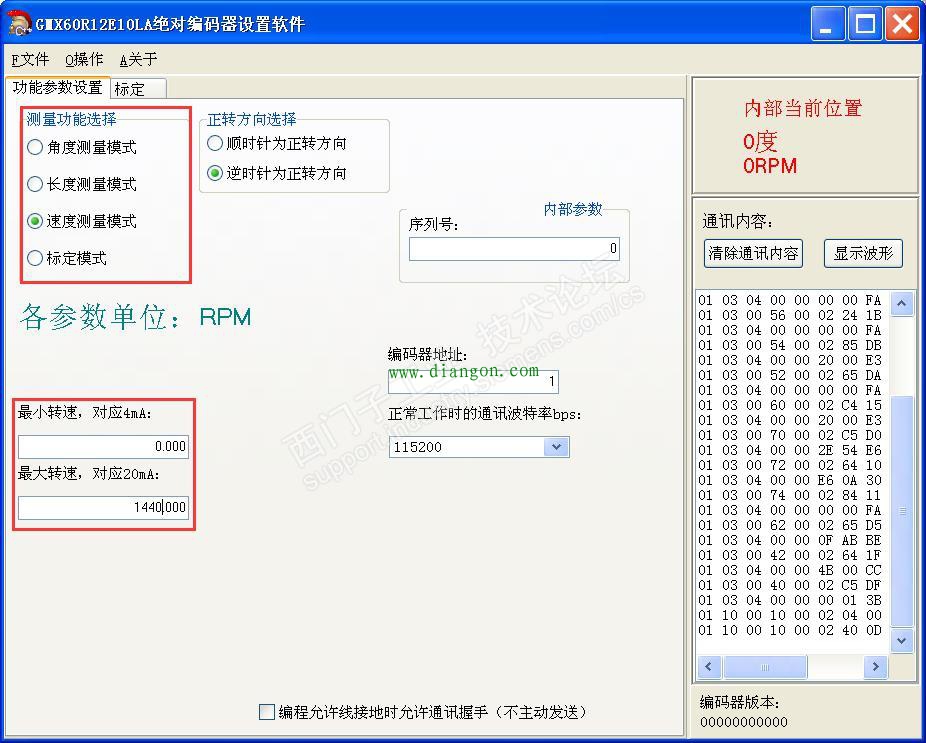
3、速度测量模式可以对输出速度模拟量进行设置,如图最小转速0时输出4mA,最大转速1440转/分钟时输出20mA,假设当前转速是720转/分钟时则输出是12mA,以此类推。
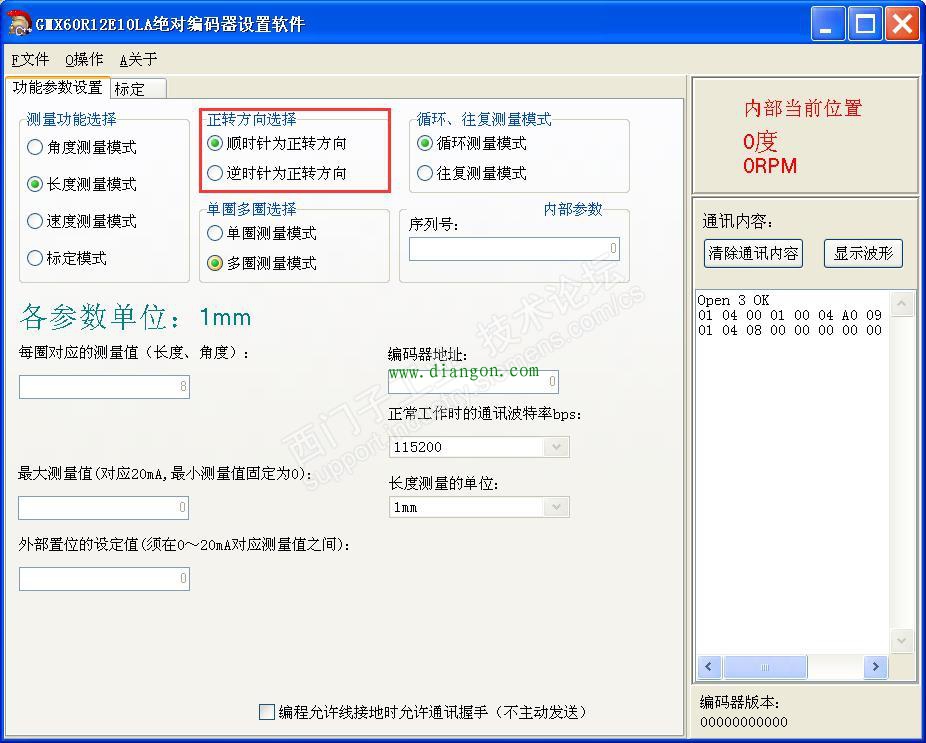
4、正转方向选择
顺时针: 面对编码器转轴端面, 顺时针旋转, 编码器数值增大。出厂默认值是顺时针。
逆时针: 面对编码器转轴端面, 逆时针旋转, 编码器数值增大。
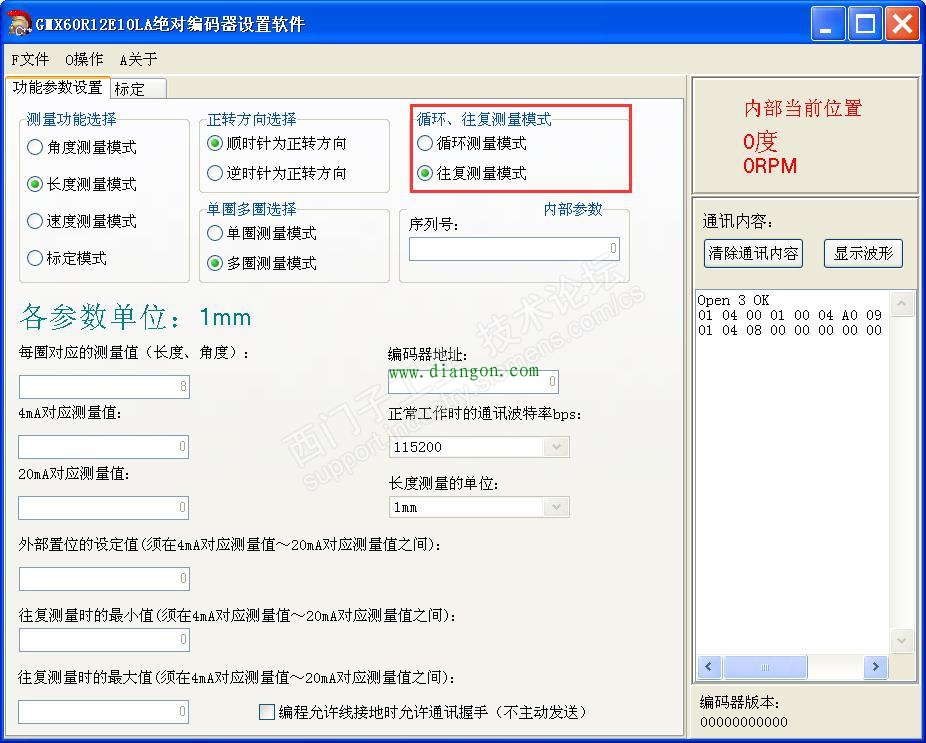
5、循环、 往复测量模式
循环测量模式: 编码器转轴, 转到最大值时, 数据从 0 开始循环输出。
数据输出形式如下:
角度测量模式: 0--90--180--270--360(0) --90-180--270-360......
长度测量模式: 0-1024-2048-4096(0) --1024---2048----4096.....
往复测量模式: 编码器转轴, 旋转至(4-20 毫安) 最大值时或者最小值的, 数据固定不变。出厂默认是往复测量模式
数据输出形式如下:
角度测量模式: 0--90° --180° --270° --360° , 继续旋转编码器转轴, 数字没有变化, 保持在 360)。
长度测量模式: 0-1024-2048-4096(继续旋转编码器转轴, 数字没有变化, 保持在 4096)。
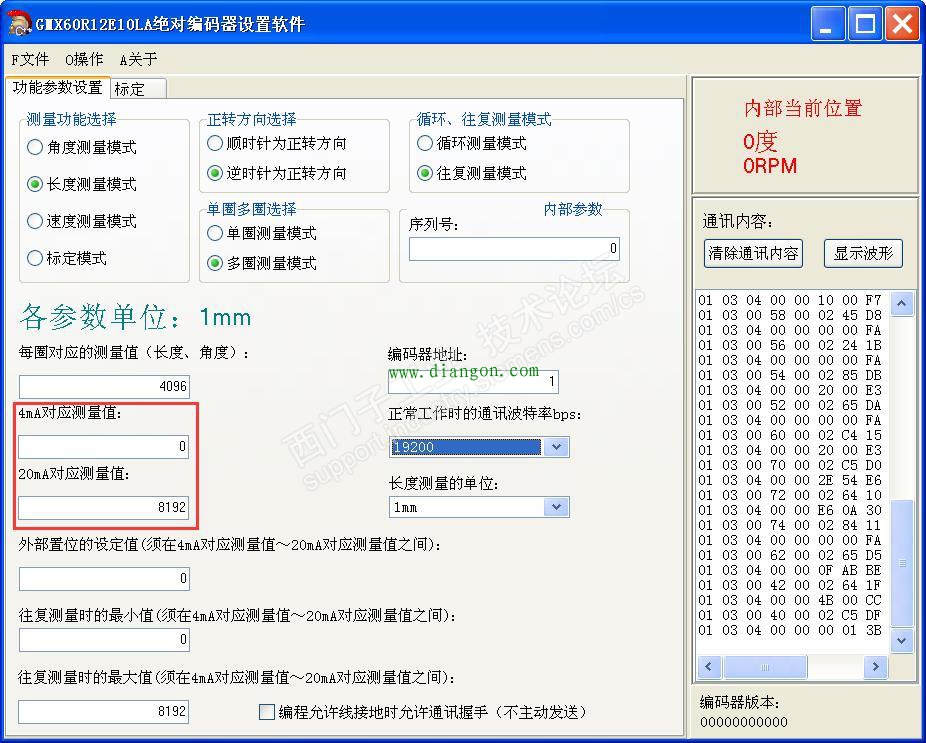
6、4mA-20mA对应测量值
4mA对应的测量值:可以设置任意位置值作为编码器的起始点,这个值对应的电流输出为4mA。
20mA对应的测量值:可以设置任意位置值作为编码器的终点(测量行程),这个值对应的电流输出为 20mA。
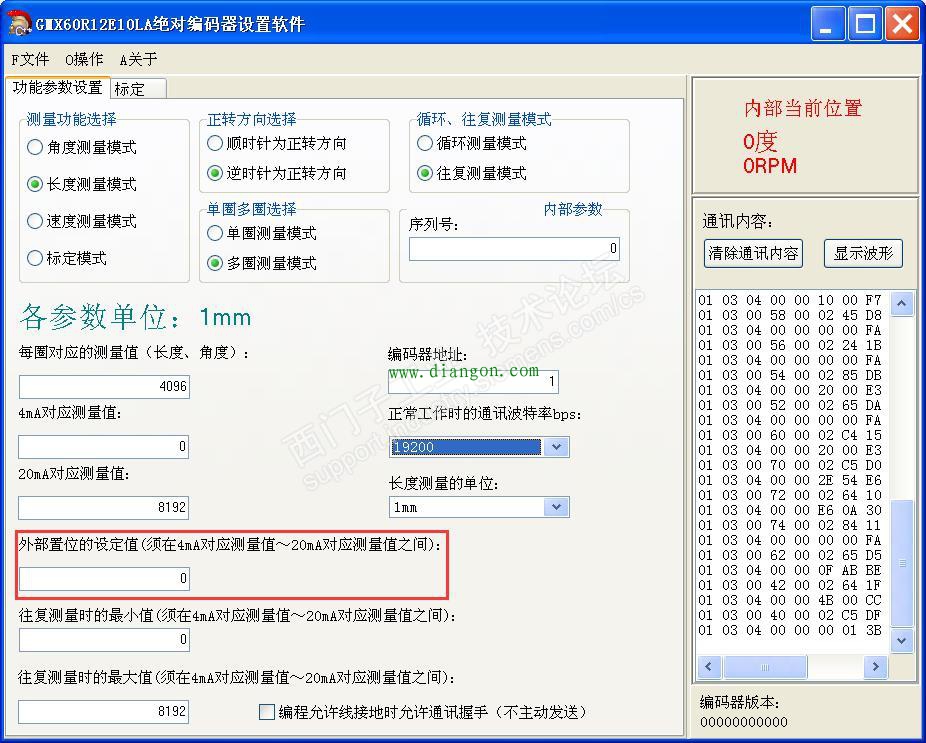
7、外部置位的设定值
外部置位值即编码器外部置位线(灰色线)和高电平接触后编码器回到的值,比如零位,也可以根据机械位置设置任意的值,比如中点置位。出厂默认值为0

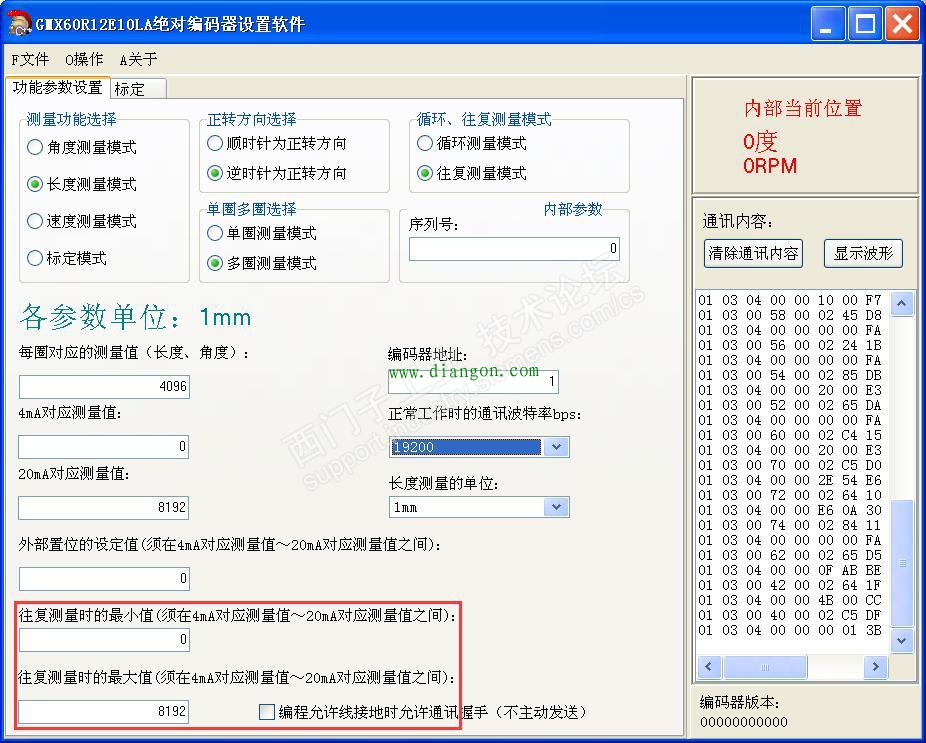
8、往复测量时的最大最小值
往复测量时的最小值: 在多圈往复测量模式下, 把编码器的起始点作为往复测量的最小值。
往复测量时的最大值: 在多圈往复测量模式下, 把编码器的终点作为往复测量的最大值。
9、编码器地址
使用MODBUS RTU总线信号的编码器进行多个(≤9) 编码器对一个 RS485 接口作从站连接时, 可分别给编码器设定不同的地址(如 01,02,03..)
注意最下面,“编程允许线接地时允许通讯握手”前面的√必须打上,如果不打√就是主动发送模式。
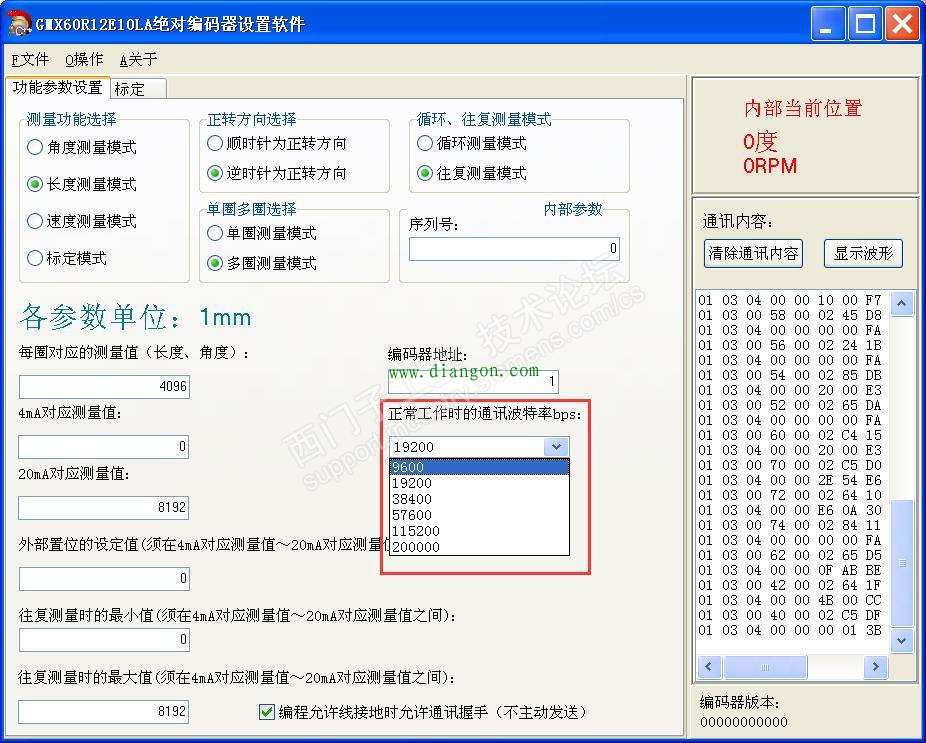
10、波特率
设备与编码器之间,双方约定一个相同的通信速度(如 RS232 协议),称之为波特率。 通讯中, 要求双方有相同的波特率, 以便正确地识别被传输的数据位。 波特率决定了通讯的速度,波特率越小, 通讯速度越慢, 同时出错率也越低。出厂默认波特率为19200。